これまで中心になって開発してきたロボットや、開発に携わった作品などのまとめです。
- ライゾマティクス所属以降
- シャドウアップ™︎シリーズ
- シャドウアップ™︎高知城
- Perfume Disco-Graphy 25年の軌跡と奇跡
- “Syn : 身体感覚の新たな地平” by Rhizomatiks × ELEVENPLAY
- Honda XR Mobility Experience | SXSW2024
- PixOrb
- 岸裕真 “xoxo-skeleton”
- 岸裕真 展覧会 “平行森林 Parallel Forests”
- 文化庁クリエイター支援事業
- 動く翼
- ANREALAGE パリコレクション 2024A/W
- 三田真一展 in-Spire – Breath of life – 呼吸
- Nosaj Thing x Daito Manabe light sync device by Rhizomatiks
- CORO
- 京都大学時代
- 業績のまとめはこちら ↓
ライゾマティクス所属以降
シャドウアップ™︎シリーズ
シャドウアップ™︎高知城
テクニカルディレクション、インスタレーションデザイン・制作を担当。
Perfume Disco-Graphy 25年の軌跡と奇跡
「We are Perfume GALLERY-C」
オブジェ設計・キャリブレーションシステムを担当
“Syn : 身体感覚の新たな地平” by Rhizomatiks × ELEVENPLAY

Honda XR Mobility Experience | SXSW2024
PixOrb
立案・開発・制作で参画。
本照明は渋谷スカイに「NEBULA」として常設導入。
岸裕真 “xoxo-skeleton”
全体のテクニカル・ディレクション。
ハードウェア・エンジニアとして24個の環境センサー基板の開発、3本の人を操る長尺ロボットアームのメカ、回路、制御システムの開発
岸裕真 展覧会 “平行森林 Parallel Forests”
全体のテクニカル・ディレクション。
ハードウェア・エンジニアとして100個の小型BIデバイスのボード選定、サブ基板の開発、筐体設計、量産、設置などを行いました。
文化庁クリエイター支援事業
【ENCOUNTERS|成果プレゼンテーション展】
— 文化庁メディア芸術クリエイター育成支援事業 (@MediaArts_C) 2024年2月22日
『Laser Ropes』竹森 達也… pic.twitter.com/O2Gzb5LVcZ
Laser Ropes -prototype case1-
「Laser Ropes -prototype case1-」
— 竹森達也 (@rbbtake) 2024年3月2日
"鋭く直進する光線"として認識されているレーザー光線が、ゴム紐のように柔らかく曲がって見えたらおもしろいのでは??という発想から制作。
制作:竹森達也
サウンド:In the blue shirt @Arimuri
支援:令和X年度文化庁メディア芸術クリエイター育成支援事業 pic.twitter.com/nErSLq2MxU
動く翼
特殊衣装として制作・納品。
ほぼ工具なしで簡単に組み立て、分解ができ、一人でも持ち運べるように様々な工夫が込められています。
【ご報告】
— ZAZY (@ZAZY06) 2024年1月27日
本来なら一人一人直接ご連絡させて頂くべきですが、こういった発表になりすみません。 pic.twitter.com/PIhIumY5jW
小さな宗教を作ることに成功。
— ZAZY (@ZAZY06) 2024年9月6日
ありがとうございました。#大人のガチ合唱#海老天を惑わす青 pic.twitter.com/wY6Ml0WnuM
ANREALAGE パリコレクション 2024A/W
Our 20th Paris Collection coming soon.
— ANREALAGE (@ANREALAGE_) 2024年2月24日
DORAEMON ANREALAGE
in
PARIS FASHION WEEK@doraemonChannel @FHCM
ANREALAGE
Autumn /Winter 2024-25 collection
“OBJECT”
【Show】
Tuesday February 27th 2024
at 17:00
【Global press】
PR consulting paris@PRConsulting pic.twitter.com/zRwHgGHEsP
三田真一展 in-Spire – Breath of life – 呼吸
Nosaj Thing x Daito Manabe light sync device by Rhizomatiks
CORO
株式会社コトブキとのコラボ。移動するファニチャー。
自律移動制御を担当。
京都大学時代
ヘビ型ロボット
学位研究での取り組み。ヘビ型ロボットで世界初となるはしご登り、険しい不整地の移動、配管上のフランジ乗り越えなどを実現。ヘビ型ロボットの開発も自分でやっています。
ロボット系トップジャーナルの一つのIEEE Transactions on Roboticsに論文が採択されました!
— 竹森達也 (@rbbtake) 2021年3月29日
ヘビ型ロボットの動作は多様ですがそれら間の遷移手法がない問題に着目し、新たに考案した「輪くぐり動作」を介することで動作遷移を伴う異環境を跨いだ移動を可能にしました。https://t.co/YuV8C4GUm3 pic.twitter.com/Gfyrr69xik
僕のヘビロボ研究の集大成的な論文がIEEE Transaction on Roboticsに採択され、Early Accessでweb公開されました。
— 竹森達也 (@rbbtake) 2022年7月22日
断面形状が未知で変化する配管上で、巻きつく体型を関節ごとレベルで細かく自律適応させる制御を実現しました。必要なフィードバックは関節角のみという。https://t.co/TZHoV4ybgt pic.twitter.com/onM1m4FUh3
- GIZMODEに掲載された記事
レスキューロボット
研究室の学生からなるレスキューロボット開発チームSHINOBIで開発。僕は2017年からチームリーダを続けており、中心的に開発に取り組んでいます。World Robot SummitやRoboCup世界大会で優勝したりしています。
FUHGA2
2018年に半年ほどで開発したFUHGA2(旧)はWorld Robot Summit 2018 インフラ・災害対応部門の災害対応標準性能評価チャレンジ(STM)部門で優勝。さらに翌年に開発した改良機であるFUHGA2(新)はRoboCup世界大会2019のRescue Robot Leagueで優勝。
関連記事
FUHGA3
FUHGAシリーズの集大成。高いモビリティ、長いアームによる作業能力に加え、3次元LiDARを前後に2つ搭載し、周辺環境情報の収集能力とそれに伴う自律移動能力が飛躍的に上昇した。RoboCup2021 Virtualで活躍(リモート開催の都合で「優勝」の概念がなかった大会のため優勝できず)。
前大会優勝機からフルアップデートした最新機FUHGA3の紹介動画です。コンパクトな機体に豊富な機能を詰めこみました。従来以上の不整地の走破性能、アームによる作業性能に加え、今回は2つの3次元LiDARを搭載したことでセンシング能力が倍増して自律機能が向上しました。それでもFUHGA2より軽いという pic.twitter.com/rEQ6rmcey2
— 竹森達也 (@rbbtake) 2021年6月28日
RoboCup世界大会終了!
— 竹森達也 (@rbbtake) 2021年6月28日
我々はレスキュー実機リーグにて4つの部門全てを1位で予選通過。部門ごとの決勝ではAutoMobilityとInspectで優勝、DexterityとMappingでは部門特化系のチームに敗北。
圧倒的な総合得点でしたが「遠隔開催の今年は総合優勝は決めない」という謎ポリシーによって二連覇ならず... pic.twitter.com/MPV0lWuB6h
エンターテイメント・HCI分野
土田さん(https://www.drpercy.jp/)に誘ってもらって趣味と研究のはざまで取り組んだロボット。自分の興味に最も直接的な内容。
mimebot
球体ディスプレイを乗せた移動ロボット。ベースの移動に合わせて球体ディスプレイの模様を回転させることで転がってるように見せかけることができる。逆に移動と回転をずらすことで滑っているように見せたりなど、多様な演出が可能。ロボット開発を担当。
Mime × Mimebots
関連記事
-
Int. J. Pervasive Computing and Communications 2018 Highly Commended Award - メカトロニクスにうってつけの日
- ロボスタ「 第一回サービスロボット開発技術展レポート(2)」
https://robotstart.info/2016/05/28/eport-service_robot_intexosaka.html
ロボトレース競技
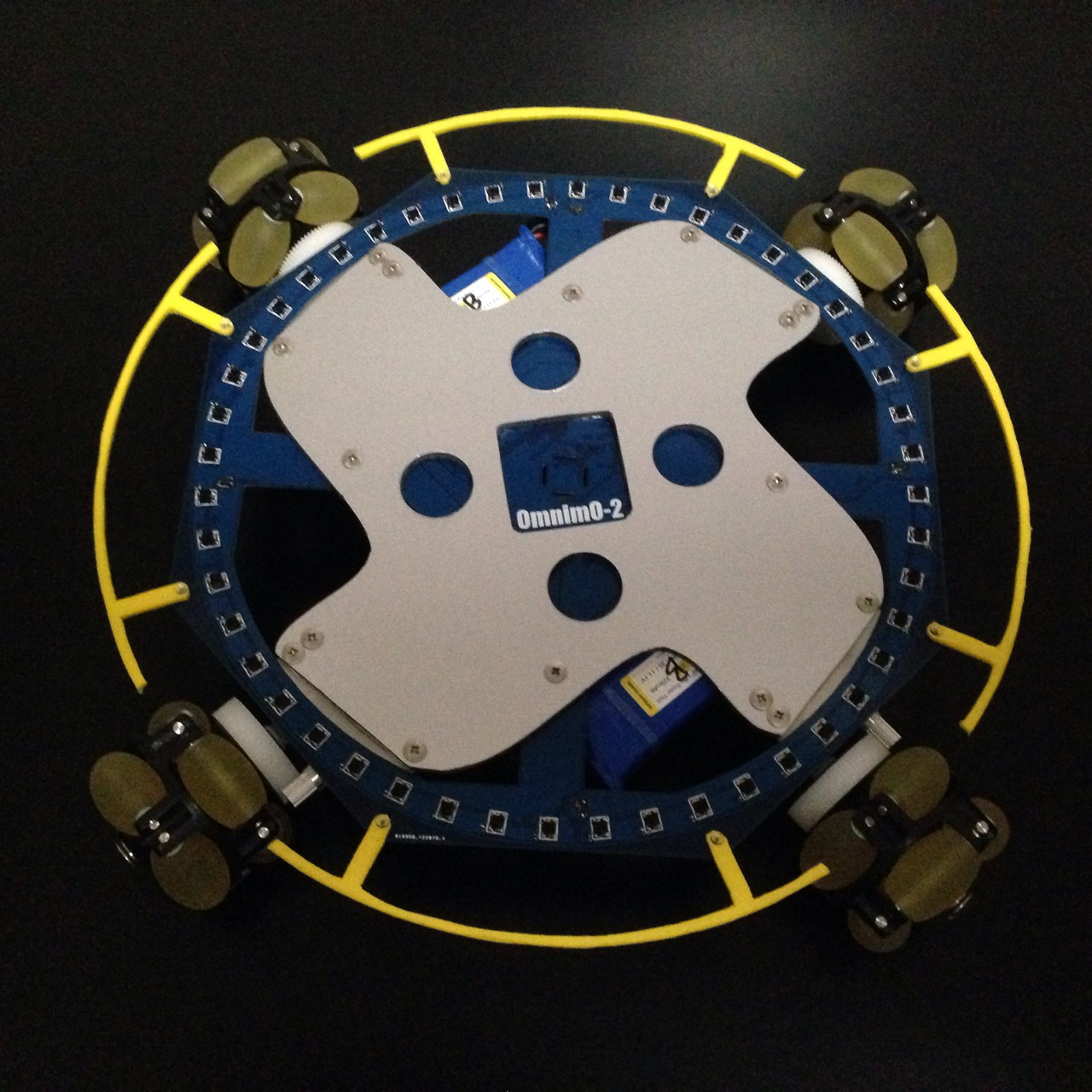
OmnimO
ロボトレース競技に出場した機体。2年生のときにOmnimO、3年生のときにOmnimO-2を製作。裏面にフォトリフレクタがたくさん並んでおり、向きを変えずに全方位のラインに追従することができる。大会にて多くの特別賞を受賞。
一週目でコースを記憶し、二週目は直線では加速しカーブ手前で減速して走る。

JITEN
大学1年の時に製作した人生初の自作ロボット。シンプルな原理でライントレースを実現。
【初めて作ったロボット紹介】
— 竹森達也 (@rbbtake) 2021年2月13日
大学1年のときに「ライントレーサーを作れ」という最初の課題にテンプレで答えたくなくて、センサ2つだけ使った単純なアルゴリズムを考案した。回転を始めて135度以内のラインを無視することで十字路を突破できるところがミソ。 pic.twitter.com/fZyK2WPP3P








